there are two possible options available to me at this stage, I can either check the speed of access to the external memory map or I can try to get the program to work by modifying the "full memory map" cmd file.
there is info in the previously referenced post on dsp related about timing
What Simone has written is excellent advice, but you also need to set
up the external interface timing or your program will run much, much
more slowly. The default setting for the timing at hardware reset is
52 clock cycles for each read or write of the external RAM.
The boards we developed for our product with the 2812 have 128K words
of SRAM mapped to the XCS6AND7 chip select, twice as much as the
eZdsp. The SRAM is 15 ns access time. We also need to use the
external clock out at half the processor core speed, because that
clock is used by a CPLD and other logic that is 100 MHz max.
Here are our settings for the external interface generally, and this
particular chip select:
XintfRegs.XINTCNF2.all = 0x00004C17;
XintfRegs.XTIMING6.all = 0x00031629;
This gives us an external clock out of 70 MHz (our DSP runs at 5 times
a 28 MHz crystal), and SRAM read and write cycles of 4 clocks each.
The 2812 has an extremely long setup time for data read from external
memory, about 13 or 14 ns, so you need almost 0 ns RAM to be able to
read in 3 clocks. The write time could be 3 clocks, but since
external bus cycles always start on a rising edge of the external
clock, there is no overall savings for setting the write time to 3
clocks, another RAM access can't start during that fourth cycle
anyway.
I don't have the definitions of the fields in those registers handy,
but if you map the hex values into bits in the registers as defined in
the XINTF data sheet you should be able to figure them out.here the bloke suggests that;
XintfRegs.XTIMING6.all = 0x00031629;
I have:
XintfRegs.XTIMING6.all = 0x04456447;
from the external interface documentation (SPRU067C) p27 the settings that they suggest are:
0x00031629
in binary
0000 0000 0000 0011 0001 0110 0010 1001
split up:
(31-24) 0000 0000 - reserved
(23) 0 - reserved
(22) 0 - X2TIMING
(21-18) 00 00 - reserved
(17-16) 11 - XSIZE
(15) 0 - READYMODE
(14) 0 - USEREADY
(13-12) 01 - XRDLEAD
(11-9) 011 - XRDACTIVE
(8) 0 - XRDTRIAL
(7) 0- XRDTRIAL
(6-5) 01 - XWRLEAD
(4-2) 010 - XWRACTIVE
(1-0) 01- XWRTRIAL
current
0000 0000 0100 0011 1111 1111 1111 1111
split up:
(31-24) 0000 0000 - reserved
(23) 0 - reserved
(22) 1 - X2TIMING
(21-18) 00 00 - reserved
(17-16) 11 - XSIZE
(15) 1 - READYMODE
(14) 1 - USEREADY
(13-12) 11 - XRDLEAD
(11-9) 111 - XRDACTIVE
(8) 1 - XRDTRIAL
(7) 1- XRDTRIAL
(6-5) 11 - XWRLEAD
(4-2) 111 - XWRACTIVE
(1-0) 11- XWRTRIAL
before I spend any more time on this one, I think I should just try to see if it works with their settings
I have put
/* external memeory timing setup */
XintfRegs.XTIMING6.all = 0x00031629;into my iniitalisation routine
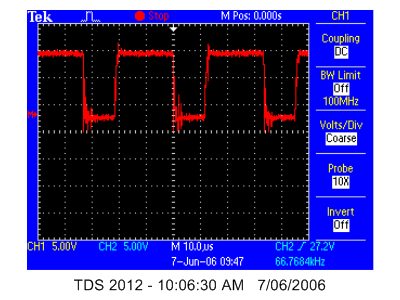
check first without the memory map adjusted
compiles, loads, does not run
commented out that line just to check it was the culprit
motor runs again
lets look at a direct comparison
X2TIMING - current: 1, chris: 0
scaling factor - 1 is default and doubles XWRLEAD, XWRACTIVE and XWRTRIAL. 0 keeps them the same
XSIZE - current: 11, chris: 11
these must be always written as 11, any other combination will result in incorrect XINTF behaviour.... interesting
READYMODE - current: 1, chris: 0
0 - synchronous, 1 - asynchrounous
USERREADY - current: 1, chris: 0
is XREADY used? 1 - yes, 0 no
XRDLEAD - current: 11, chris: 01
this defines the read cycle lead period
note that this is mulitplied by X2TIMING
00 - invalid
01 - 1 XTIMCLK cycle
10 - 2 XTIMCLK cycles
11 - 3 XTIMCLK cycles
XRDACTIVE - current: 111, chris: 011
this defines the read cycle active wait period
note that this is mulitplied by X2TIMING
000 - 0
001 - 1 XTIMCLK cycle
010 - 2 XTIMCLK cycles
011 - 3 XTIMCLK cycles
100 - 4 XTIMCLK cycles
101 - 5 XTIMCLK cycles
110 - 6 XTIMCLK cycles
111 - 7 XTIMCLK cycles
XRDTRIAL - current: 11, chris: 00
this defines the read cycle trail period
note that this is mulitplied by X2TIMING
00 - 0
01 - 1 XTIMCLK cycle
10 - 2 XTIMCLK cycles
11 - 3 XTIMCLK cycles
XWRLEAD - current: 11, chris: 01
this defines the write cycle lead period
note that this is mulitplied by X2TIMING
00 - invalid
01 - 1 XTIMCLK cycle
10 - 2 XTIMCLK cycles
11 - 3 XTIMCLK cycles
XWRACTIVE - current: 111, chris: 010
this defines the write cycle active wait period
note that this is mulitplied by X2TIMING
000 - 0
001 - 1 XTIMCLK cycle
010 - 2 XTIMCLK cycles
011 - 3 XTIMCLK cycles
100 - 4 XTIMCLK cycles
101 - 5 XTIMCLK cycles
110 - 6 XTIMCLK cycles
111 - 7 XTIMCLK cycles
XWRTRIAL - current: 111, chris:01
this defines the write cycle trail period
note that this is mulitplied by X2TIMING
00 - 0
01 - 1 XTIMCLK cycle
10 - 2 XTIMCLK cycles
11 - 3 XTIMCLK cycles
the most obvious change that I need to make is to avoid the use of xready
ie changing from
0000 0000 0100 0011 1111 1111 1111 1111
to
0000 0000 0100 0011 1011 1111 1111 1111
or
10000111011111111111111
or
4440063 in decimal
or
43BFFF in hex
compiles, loads, motor does not work and Xtiming6 does not change
when I try to define the same value (4456447) the motor works
try defining 4440063 in decimal rather than hex
motor works and userready is now 0 (not using xready)
change .ebss to zone6
builds, loads, motor does not work
try to avoid the avoid asynchronous (late)
10000110011111111111111
or
4407295
change back .ebss to DRAM for this trial
works - change to ZONE6
does not work
try chris' number but in dec
does not work - bedtime
tomorrow I should try to use the full_memory_map and modify it.
change back to 4407295 and dramho
works
on further checking, synchronous does not work. use 4440063
checking again - it does work - definetly bed time