Back emf testing
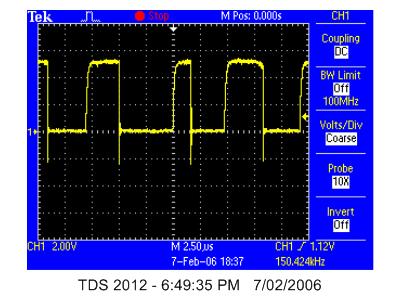
Vincent has done some good testing of back emf. This is meant to be all at the same speed:
overall

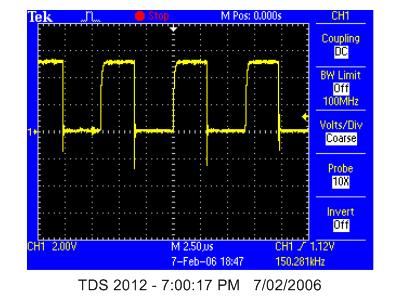
best peak zoomed

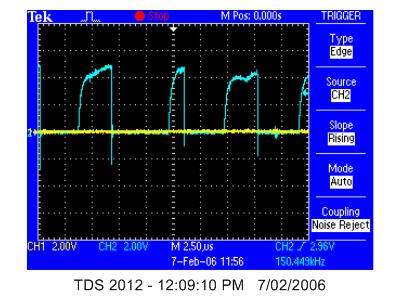
worst peak zoomed

posted by Greg @ 2:01 PM
0 comments
![]()
To anyone who stumbles on this, you are going to be very bored, this is just written so that I can keep track of my own progress.
Vincent has done some good testing of back emf. This is meant to be all at the same speed:
posted by Greg @ 2:01 PM
0 comments
![]()
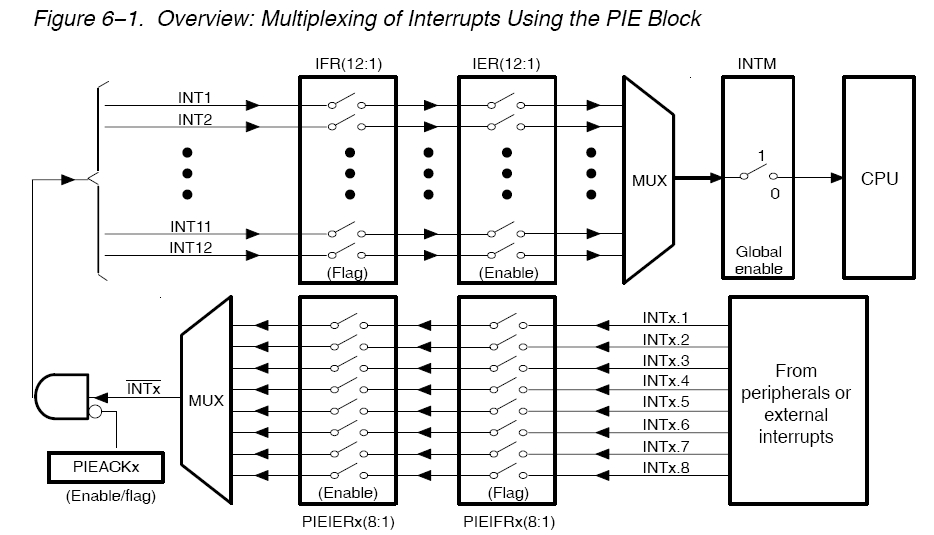
I have modified one of Jess' old programs to attempt to use XINT1. The main program only loops and then the ISR also loops.

posted by Greg @ 11:52 AM
0 comments
![]()
To get one current sensor to work, I will start by using XINT1.
posted by Greg @ 2:49 PM
0 comments
![]()
It has come clear from my attempts to understand the interrupt block, that I will need to first write a program that uses interrupts in C-code in CCS.

posted by Greg @ 11:13 AM
0 comments
![]()
I think that the best way will be to modify an exsisting interrupt block...
posted by Greg @ 12:09 PM
0 comments
![]()
maybe I would be better off using MEX S-Function Wrapper
posted by Greg @ 11:29 AM
0 comments
![]()
type mexext in the command window
posted by Greg @ 11:13 AM
0 comments
![]()
Just had a read of the document about implementing IR2175 interface with a TI dsp. This is the plan:
posted by Greg @ 3:56 PM
0 comments
![]()
first I need to understand the meaning of C28xCAP_o2. Which I think that I do after reading the following:
posted by Greg @ 2:38 PM
0 comments
![]()
Using this model:


posted by Greg @ 10:12 AM
0 comments
![]()
I couldn't help myself. I could not wait until tomorrow to find out what the frequency spectrum for the whole motor assembly was. Maybe I should have waited and not ruined my night.

posted by Greg @ 6:21 PM
0 comments
![]()
This data is now stored in a buffer. I have to learn to deal with a buffer - maybe using memory blocks.
posted by Greg @ 4:20 PM
0 comments
![]()
One obvious reason that I am getting zero into the registers of the CAP block is that I_pwm 1 is not connected to CAP1.
posted by Greg @ 3:55 PM
0 comments
![]()
Ben has found that when impacting the housing from the ends, he is getting a low frequency vibration of about 25Hz on sensors 3 and 4. This is happening regardless of which end is impacted.




posted by Greg @ 3:40 PM
0 comments
![]()
Now that I have a known signal from my IR2175, I should try some capture into the DSP. There is an application note for this that I should have a look at first. It may also be time to figure out how to output data somehow.
posted by Greg @ 11:45 AM
0 comments
![]()
Ben has been doing some pretty good work on the vibration response to hammer excitation. Here are some images:





posted by Greg @ 11:01 AM
0 comments
![]()
The problem yesterday was a dead IR2175. Today it looks a little better!



posted by Greg @ 9:59 AM
0 comments
![]()
Now that the DC current sensing board has been finished - here are a few of the specs:





posted by Greg @ 1:25 PM
0 comments
![]()
Following a discussion with Friso, we decided that it would be best to make a circuit that used the IR2175 in a DC situation. This will allow me to callibrate the sensors by supplying a fixed current from a digital power supply.
posted by Greg @ 1:48 PM
0 comments
![]()
I should check that the PO pin is connected correctly. In figure 8 in the application note there is only a pullup shown. I have taken the series resistor out and the result seems a little better.




posted by Greg @ 3:46 PM
0 comments
![]()
After that interesting little interlude, it is time to keep checking the current sensing circuit. I now think that the negative transient protection is working fine (at least for the current operating conditions). It it time to check the bootstrap circuit.

posted by Greg @ 2:51 PM
0 comments
![]()
an interesting outcome of checking the Vs pin on the IR2175 for negative transients is that for differnet hall effect postions, the voltage shape for each PWM pulse is different.



posted by Greg @ 1:59 PM
0 comments
![]()
time to go through and check each of the circuits.
posted by Greg @ 1:46 PM
0 comments
![]()
Time to go back to the schematics.
posted by Greg @ 11:09 AM
0 comments
![]()
This is the week to sort out the current sensing problems.


posted by Greg @ 10:42 AM
0 comments
![]()
